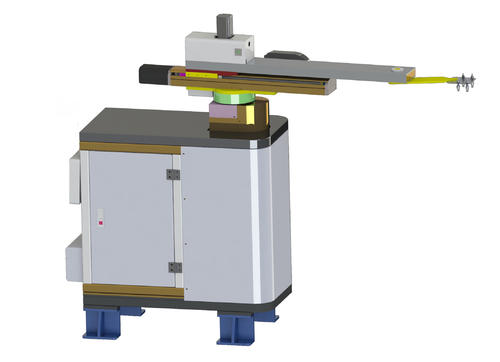
上下料機械手主要由執行機構�、驅動機構和控制系統三大部分組成���。手部是用來抓持工件(或工具)的部件����,根據被抓持物件的形狀��、尺寸�、重量�����、材料和作業要求而有多種結構形式�,如夾持型����、托持型和吸附型等���。運動機構����,使手部完成各種轉動(擺動)���、移動或復合運動來實現規定的動作��,改變被抓持物件的位置和姿勢�����。運動機構的升降���、伸縮�、旋轉等獨立運動方式��,稱為機械手的自由度��。
?��。?)物料運搬用有限點位控制的程序控制機器人�,重負載用液壓驅動�����,中等載荷可選用電動驅動系統�,輕載荷可選用氣動驅動系統���。沖壓機器人多用氣動驅動系統���。
?。?)用于點焊和弧焊及噴涂作業的機械手��,要求具有任意點位和軌跡控制功能����,需采用伺服驅動系統�,需采用液壓驅動或電動驅動系統方能滿足要求�。按動力源分為液壓���、氣動��、電動�,也可根據需要三種混合得到復合式驅動系統���。