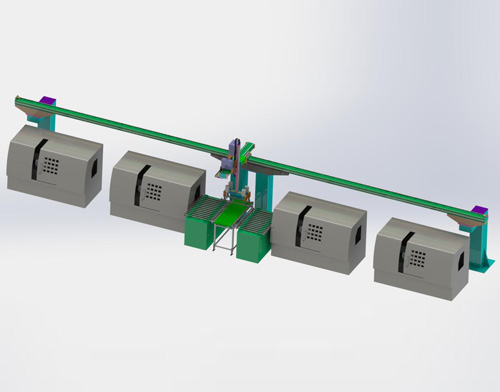
沖壓機械手是應用最多的一種形式����,它適用于搬運和測量工件���。具有直觀性好����、結構簡單����、本體占用的空間較小的特點��。其動作范圍可分為:一個旋轉運動���,一個直線運動加一個不在直線運動所在平面內的旋轉運動��,兩個直線運動加一個旋轉運動�。其傳動機構采用哪種形式��,主要根據工件的輕重來決定���。若按擺動式扭矩來設計���,則油缸將加大�,而裝載油缸的機架也將隨之加大�。特別是靠近關節式前端關節部分的重量對肩部影響很大���。傳動機構在承受負荷的同時必須承受自重����,因此��,傳動效率低����。如需要大的轉動角�,則宜采用擺動油缸�。
在過去幾年����,中國已發展成為未來沖壓機械手的重要市場�����。這些工業制造中的新成員面向工業領域的多關節機械手或多自由度的機器人����。工業機器人是自動執行工作的機器裝置�,是靠自身動力和控制能力來實現各種功能的一種機器�。沖壓機械手可以接受人類指揮�,也可以按照預先編排的程序運行���,現代的工業沖壓機械手還可以根據人工智能技術制定的原則綱領行動�����。